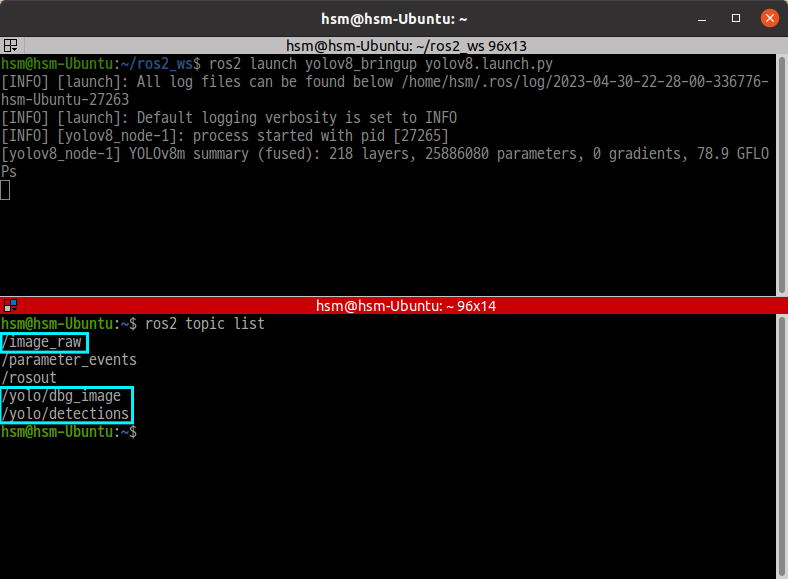
이제 YOLOv8을 사용하기로 결정했으니 ROS2와 연동하여 사람을 detect할 수 있게 만들어야 합니다. 카메라를 통한 이미지 topic을 받은 후(subscribe)에 YOLOv8로 object를 detect한 후 그 결과를 navigation이 사용할 수 있도록 publish해줘야 하죠. 따라서 저는 topic을 보내고 받는 역할을 수행하기 위해 node와 이 node를 실행시킬 launch 파일이 필요합니다. YOLOv7까지는 이를 자동으로 만들어 ROS와 연동시켜주는 darknet_ros 라는 패키지가 존재하나 제가 사용할 YOLOv8은 나온지 얼마되지 않아서인지 지원하지 않았습니다. node와 launch 파일을 직접 만들어야하는 머리 아픈 상황에서 혹시나 하는 마음으로 github를 뒤져본..