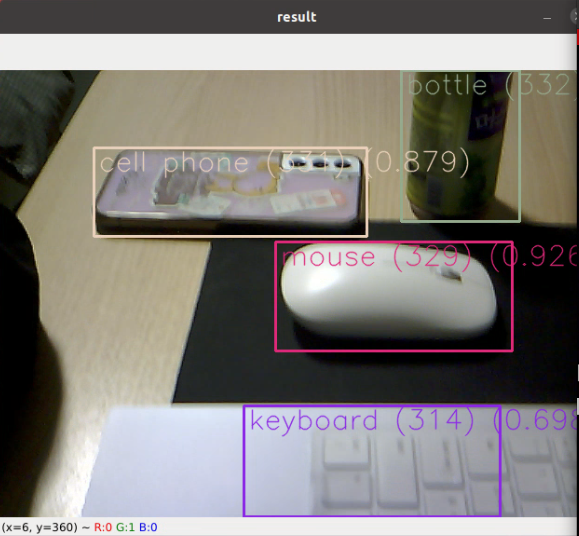
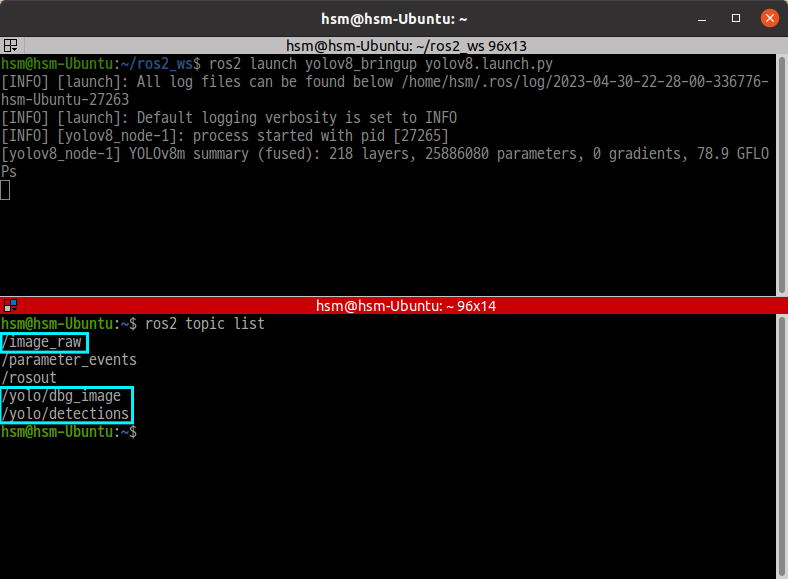
YOLOv8을 ROS2와 성공적으로 연동시켰으니 이제는 실제 카메라를 이용해서 객체를 잘 검출하는지 확인해 볼 차례입니다. 당장 저에게 real sense camera나 성능 좋은 카메라가 없기 때문에 집에 굴러다니는 usb 카메라를 이용해 확인해볼 생각입니다. 그렇다면 먼저 ROS2와 연동되며, usb 카메라의 이미지 정보를 publish 해줄 node가 필요합니다. 이를 이미 구성해놓은 코드는 github에서 손쉽게 찾을 수 있었습니다. https://github.com/ros-drivers/usb_cam/tree/ros2 GitHub - ros-drivers/usb_cam: A ROS Driver for V4L USB Cameras A ROS Driver for V4L USB Cameras. Con..